

根據外媒報導,自 2021 年「毅力號」(Perseverance)登陸火星以來,所有的地表移動皆仰賴嚴密的人工指令。然而,去年 12 月 8 日至 10 日,這項傳統被打破。NASA 噴射推進實驗室(JPL)首度測試由 Anthropic 開發的大型語言模型 Claude 負責繪製路線,引導毅力號順利通過耶澤羅撞擊坑(Jezero crater)約 400 公尺的複雜岩石區。這標誌著星際探測從「人工預設路徑」轉向「AI 輔助決策」的技術分水嶺。
技術解析:Claude Code 的數據餵入與邏輯迭代
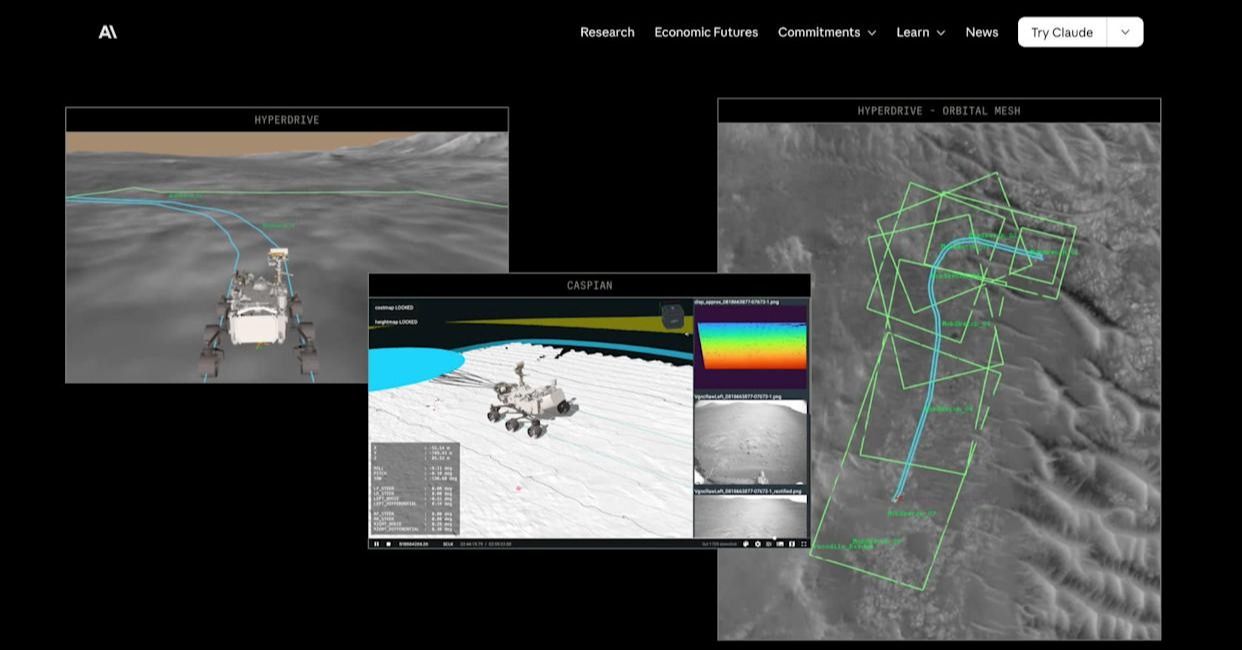
要讓 AI 指揮汽車大小的機器人,關鍵在於數據的上下文銜接(Contextual Data)。NASA 透過 Anthropic 的程式開發代理工具 Claude Code,將毅力號過去五年的環境特徵、行駛參數與地形限制進行系統性餵入。Claude 採用的導航邏輯是以 10 公尺為基準單元,將整段路徑拆解成多個「微路徑點」。不同於傳統演算法,Claude 能在編寫指令的過程中,對路徑的安全性進行自主評註與迭代優化,確保留下的「麵包屑」軌跡避開打滑與傾覆風險。
雙重驗證機制:模擬系統與地面層級影像微調
JPL 工程師並非直接套用 AI 生成的指令,而是將 Claude 產出的路徑點匯入每日運行的任務模擬軟體中進行高保真度驗證。測試結果顯示,AI 規劃的路線準確度極高,僅需針對少數「地面層級(ground-level)」影像,即 AI 在規劃階段未曾接觸到的近距攝影細節進行細微更動。這項實驗證明了 LLM 在處理非結構化數據與生成技術指令上的強大潛力,可將繁瑣的導航規劃流程縮短 50% 的時間。
從 8 位元邏輯到星際探索:自主系統的演進曲線
這項技術突破也體現了模型推理能力的飛躍,就在去年,Claude 在處理簡單的 8 位元遊戲邏輯時仍顯吃力,如今已能勝任行星級的自動化導航任務。對於 NASA 而言,在人力資源緊縮的現況下,將資源向 AI 自動化傾斜已是技術轉型的核心策略。未來,隨著 AI 處理長文本與空間邏輯的能力提升,這種「自主 AI 系統」將成為無人探測器深入太陽系邊陲、應對通訊延遲的關鍵技術架構。
核稿編輯:Mia
加入 INSIDE 會員,獨享 INSIDE 科技趨勢電子報,點擊立刻成為會員!
延伸閱讀:
- 在月球飆速上網!NASA 委外研發月面 Wi-Fi 系統,Solstar 獲 15 萬美元合約
- NASA 將重返月球!載人繞月任務,挑戰 50 年來最遠飛行距離,星艦成關鍵
您可能也會喜歡

Raoul Pal分析:加密不沒有崩盤而是「美元流動性枯竭」,2026 仍是超級大多頭

印度2026年預算維持加密貨幣稅收、TDS不變,新增545美元疏失罰款
市場
分享
分享此文章
複製連結X (Twitter)LinkedInFacebook電子郵件
印度2026年預算保留加密貨幣稅、TDS
